![]()
| Study Case | https://doi.org/10.21041/ra.v15i1.781 |
Detección de defectos con YOLOv8 para determinar el estado de los pavimentos asfálticos
Defect detection using YOLOv8 for determining the condition of asphalt pavements
Detecção de defeitos utilizando YOLOv8 para determinação da condição de pavimentos asfálticos
A. M. Souza1* , C. E. Oliveira1, P. H. B. Decker1, A. L. S. C. Correa1, G. E. R. Amorim1, H. B. Fontenele1
, C. E. Oliveira1, P. H. B. Decker1, A. L. S. C. Correa1, G. E. R. Amorim1, H. B. Fontenele1
1 Department of Civil Construction, State University of Londrina, Londrina, Brazil.
*Autor de contacto: atilamarconcine@gmail.com
Recibido: 19/09/2024
Revisado: 19/11/2024
Aprobado: 10/12/2024
Publicado: 01/01/2025
| Citar como: Souza, A. M., Oliveira, C. E., Decker, P. H. B., Amorim, G. E. R., Correa, A. L. S. C, Fontenele, H. B. (2025), “Defect detection using YOLOv8 for determining the condition of asphalt pavements.”, Revista ALCONPAT, 15 (1), pp. 79 – 91, DOI: https://doi.org/10.21041/ra.v15i1.781 |
Resumen
Este estudio tuvo como objetivo evaluar la capacidad de detectar baches, reparaciones y fisuras, utilizando el algoritmo YOLOv8. Para ello se filmó un tramo de una carretera, el cual fue evaluado en campo, de forma manual y comparado con una evaluación semiautomática basada en el procesamiento del video por parte del modelo. El uso del modelo produce varios resultados diferentes a los obtenidos mediante la evaluación de campo. Aunque en la evaluación solo se utiliza una parte del índice de condiciones de mantenimiento, es la primera vez que se utiliza un índice junto con YOLOv8. Por lo tanto, se concluye que el modelo requiere mejoras para ser viable y aplicarse definitivamente.
Palabras clave: automatización; algoritmo; imagen; visíon artificial; detección de objetos.
1. INTRODUCCIÓN
En Brasil, el principal modo de transporte tanto para personas como para cargas es el carretero. Según datos del Sistema Nacional de Vialidad (SNV), la red vial del país se extiende por aproximadamente 1,7 millones de kilómetros, de los cuales solo 213,5 km están pavimentados. De la extensión pavimentada, la llamada Encuesta CNT de Carreteras, en su versión de 2023, evaluó 111.502 km, cerca del 52% del total, utilizando una gama de indicadores que abarcan desde las condiciones del pavimento hasta la presencia de señalización y geometría de las vías. Como resultado, concluyó que solo alrededor del 32,5% se encuentran en estado óptimo o bueno, mientras que el 26,1% están en estado malo o pésimo (CNT, 2023).
Con el mismo objetivo de evaluar la condición de las carreteras brasileñas, en específico las federales, el Departamento Nacional de Infraestructura de Transportes (DNIT) publica mensualmente datos relacionados con el llamado Índice de Condición de Mantenimiento (ICM), que permite clasificar las condiciones de las vías. Este método será discutido y aplicado más adelante en este trabajo. Según la versión de marzo de 2024, de los aproximadamente 65.800 km de carreteras federales pavimentadas, hay datos disponibles del ICM para tramos que suman una extensión de 49.500 km, de los cuales el 77,7% fueron clasificados como buenos, el 15% como regulares y el 7,3% como malos o pésimos (DNIT, 2024). Por lo tanto, no hay datos disponibles para alrededor del 25% de la red federal pavimentada, mientras que la brecha de datos es aún más crítica para las carreteras estatales pavimentadas, así como para las no pavimentadas (CNT, 2023). Así, evaluar la calidad de los pavimentos es de gran relevancia y constituye una brecha significativa en el contexto nacional. Lin, Chen y Kuo (2021) mencionan que los defectos en la superficie de las carreteras, como baches y remiendos, representan un gran riesgo para los usuarios: además de causar daños en la suspensión de los vehículos, tienen una gran influencia en la ocurrencia de accidentes.
Realizar levantamientos y verificaciones de las condiciones del pavimento es fundamental para evaluar su situación actual y prever tendencias de comportamiento futuro. Esto constituye un desafío significativo en el país, dada su extensa red vial. Según Gong et al. (2023), estas evaluaciones son importantes para determinar prioridades de intervención y para ayudar en la elección de métodos de mantenimiento y rehabilitación, fundamentales para los Sistemas de Gestión de Pavimentos.
Considerando que la inspección visual de defectos en el pavimento es un proceso complejo y poco eficiente que requiere una gran cantidad de mano de obra, Chunlong et al. (2024) mencionan que el uso de nuevas tecnologías en la captura de imágenes, junto con técnicas computacionales relacionadas con la inteligencia artificial, más específicamente el aprendizaje profundo, puede proporcionar apoyo técnico para la recolección y el reconocimiento de imágenes de defectos en los pavimentos.
Un algoritmo destacado en la literatura relacionada con este tema es el You Only Look Once (YOLO), una herramienta de detección de objetos en imágenes basada en la teoría del aprendizaje profundo (Du y Jiao, 2022). Según Lu et al. (2015) y Zhao et al. (2019), este modelo explora los datos de diferentes muestras a través de una estructura de red neuronal convolucional, lo que lo hace eficiente para la detección de objetos complejos, como los defectos en las carreteras.
En este contexto, esta investigación tuvo como objetivo evaluar la capacidad de identificación de defectos de diferentes tipos (baches, remiendos y grietas) a partir de la filmación de un tramo de carretera con signos evidentes de deterioro. Para ello, se utilizó el algoritmo de detección de objetos YOLOv8 mediante el entorno de ejecución Google Colab. Además, con el fin de probar el modelo, se comparó el ICM calculado manualmente (con los datos obtenidos en campo) y de forma semiautomática (con la información proveniente del procesamiento de la filmación por el modelo).
2. REVISIÓN BIBLIOGRÁFICA
Dada la importancia de los pavimentos como infraestructuras de transporte y considerando la amplia gama de defectos a los que sus estructuras son susceptibles, el uso de tecnologías computacionales como herramientas para ayudar en la gestión de pavimentos surge como una alternativa que busca proporcionar, sobre todo, agilidad en los análisis de campo (Pan y Zhang, 2021). Según El Hakea y Fakhhr (2023), las potencialidades en el uso de estas herramientas incluyen, por ejemplo, la clasificación, detección (mapeo), segmentación y cuantificación de los defectos, además de posibilitar la evaluación de las condiciones de desgaste de los pavimentos.
Aunque el proceso tradicional de detección de defectos en pavimentos mediante visión artificial surgió como un proceso complejo y laborioso, con baja eficiencia, Huang et al. (2023) mencionan que los avances en las tecnologías de detección de imágenes y en los dispositivos de aprendizaje profundo han ofrecido mayor soporte técnico para la recolección de imágenes y el reconocimiento de defectos en los pavimentos.
La detección de objetos a lo largo de los años ha demostrado ser un componente crítico en diferentes áreas. Existen varios algoritmos que realizan esta actividad de visión computacional, en la cual, según Terven et al. (2023), el YOLO se destaca por su velocidad y precisión en la identificación de objetos en imágenes. La primera versión de este algoritmo surgió en 2015, y desde entonces se han desarrollado varias otras versiones basadas en su arquitectura. Hussain (2023) y Terven et al. (2023) comentan que en 2023 la empresa Ultralytics (que también lanzó YOLOv5) anunció YOLOv8, que presenta una serie de novedades en relación con las arquitecturas anteriores.
La Figura 1 ilustra la arquitectura del YOLOv8, dividida en 3 partes: BackBone, Neck y Head. El BackBone está compuesto por diversas capas convolucionales y es responsable de extraer las características de la imagen recibida (Input). Estas, a su vez, se combinan en el Neck, donde se generan tres feature maps, para objetos grandes, medianos y pequeños, respectivamente. Finalmente, en la Head, las detecciones se realizan de forma separada y luego se combinan para generar la imagen de salida (Output), que contiene la ubicación del objeto junto con la confiabilidad, a través de un cuadro delimitador (bounding box) (Ju y Cai, 2023; Terven et al., 2023).
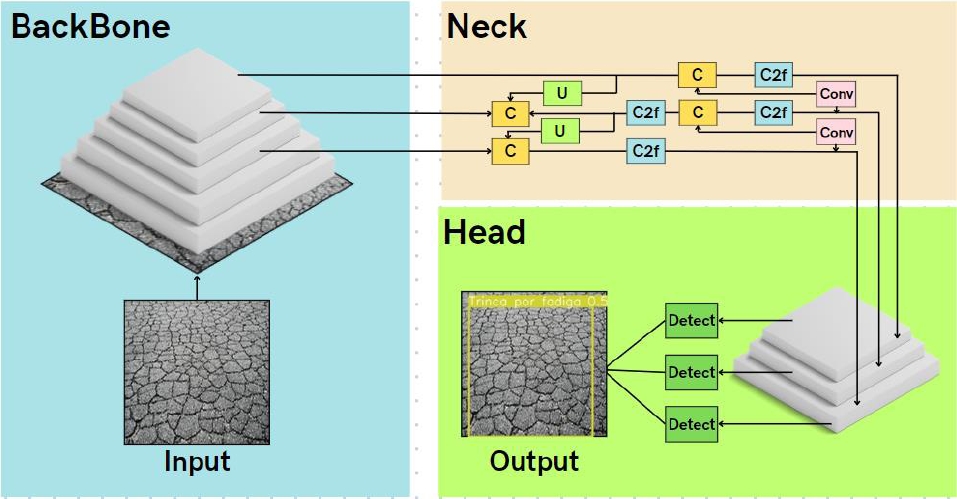
Figura 1. Arquitectura del YOLOv8
En virtud de la importancia y las potencialidades de la herramienta, y considerando la constante evolución del algoritmo, se han realizado diversos trabajos con el YOLO en los últimos años, buscando ampliar la variedad de defectos a ser identificados, así como mejorar la eficiencia de la tecnología (Du y Jiao, 2022). Entre estos trabajos, se pueden mencionar: Lin et al. (2021), quienes utilizaron YOLOv3 para la detección de defectos en general en los pavimentos de Taiwán; Ma et al. (2022) y Gong et al. (2023), que adoptaron el método de detección automatizada para identificar fisuras, respectivamente, a partir de una versión adaptada de YOLOv3 y de YOLOv2; Huang et al. (2023), quienes desarrollaron un modelo compacto para la detección de defectos basado en YOLOv7; Gonçalves et al. (2023), que realizaron una revisión bibliográfica y presentaron el estado del arte sobre el uso de visión computacional para la detección de defectos en pavimentos, revisando así diversos algoritmos aplicados por otros autores; Chunlong et al. (2024), que utilizaron un contexto mejorado de YOLOv7 para la identificación de diversos tipos de grietas; y Yao et al. (2024), quienes propusieron un sistema de optimización del método basado en YOLOv7 para la detección automática de grietas y baches en pavimentos.
A continuación, en la Tabla 1 se presentan las informaciones relacionadas con la versión del modelo YOLO adoptada (o revisada), el tipo de pavimento estudiado, así como los defectos considerados en cada trabajo.
Tabla 1. Versión de YOLO, tipo de pavimento y defectos estudiados
| Autor | Año | Modelo YOLO | Tipo de pavimento | Defectos estudiados |
| Chunlong Z. et al. | 2024 | YOLOv7 | Asfalto | Grietas transversales, grietas longitudinales y grietas por fatiga |
| Yao H. et al. | 2024 | YOLOv7 e YOLOv5 | Asfalto y concreto | Grietas transversales, grietas longitudinales, grietas por fatiga y baches |
| Gonçalves M. et al. | 2023 | Diversos | Diversos | Diversos |
| Huang P. et al. | 2023 | YOLOv7 | Asfalto | Baches, remiendos, grietas |
| Gong H. et al. | 2023 | YOLOv2 | No especificado | Grietas transversales, grietas longitudinales, grietas por fatiga y baches |
| Du F.; Jiao S. | 2022 | YOLOv5s | Asfalto | Grietas transversales, grietas longitudinales, grietas por fatiga y baches |
| Ma D. et al. | 2022 | YOLO-MF (baseado no YOLOv3) | Concreto | Grietas en general |
| Lin Y. et al. | 2021 | YOLOv3 | No especificado | Grietas, baches y remiendos |
En general, cada estudio presenta pequeños puntos para posibles mejoras en los sistemas de visión computacional en el contexto de la extracción de defectos. Chunlong et al. (2024), por ejemplo, introducen nuevos algoritmos de agrupamiento de frames, así como un nuevo módulo para agrupación. Yao et al. (2024) compararon modelos basados en la versión YOLOv7 con un modelo optimizado derivado de YOLOv5 y, aunque obtuvieron un rendimiento superior, esto se logró a costa de seis veces más parámetros y con una velocidad de procesamiento tres veces menor.
Aun así, Ma et al. (2022), Yao et al. (2024) y Chunlong et al. (2024) señalan brechas en el desarrollo de métodos para la detección de defectos en pavimentos, especialmente en condiciones de fondo e iluminación complejas, o en situaciones climáticas adversas. Huang et al. (2023) y Du y Jiao (2022) proponen algoritmos compactos que buscan mejorar o mantener la precisión en la extracción de defectos en pavimentos, al mismo tiempo que reducen la demanda computacional para su aplicación.
A partir de una revisión de diversos estudios, Gonçalves et al. (2023) buscaron evaluar la eficacia en el uso de bases de datos de imágenes disponibles en línea para el entrenamiento profundo. Para ello, identificaron trabajos que utilizaron desde 200 imágenes como base de datos hasta otros que usaron más de 18.000. Según los autores, queda clara la necesidad de mejorar la calidad de las bases de datos disponibles. Además, señalan la tendencia de mejora en los resultados obtenidos cuando se utilizan más imágenes de referencia para el entrenamiento de los modelos. Estas conclusiones están en línea con lo planteado por Huang et al. (2023) y Gong et al. (2023).
En este contexto, Du y Jiao (2022) se preocuparon por la falta de confianza en la calidad de bases de datos abiertas debido a inconsistencias en factores como el ángulo de filmación, la intensidad de la luz y la claridad, por lo que optaron por desarrollar sus propios datos. Asimismo, los autores proponen mejoras a los datos existentes, incluso mediante plataformas como Baidu Street View, análogo al más popular en Brasil, Google Street View.
3. MATERIALES Y MÉTODOS
La metodología de este trabajo se dividió en cuatro etapas, como se ilustra en la Figura 2, siendo estas, en orden: montaje de la base de datos, entrenamiento del modelo YOLOv8, filmación de una vía utilizando una GoPro Hero 10 Black para la prueba del modelo y cálculo del Índice del Pavimento (IP), que es parte integrante del cálculo para determinar el Índice de Condición de Mantenimiento (ICM).

Figura 2. Etapas de la metodología
Para la creación de la base de datos se utilizó el sitio web RoboFlow Universe. A través de este, fue posible descargar bases de imágenes públicas de forma gratuita. Entre las imágenes disponibles para uso, se encontraron diversos tipos de defectos presentes en la superficie de los pavimentos, de los cuales se seleccionaron cinco como objeto de estudio: bache, remiendo, grieta por fatiga, grieta longitudinal y grieta transversal.
La base de imágenes creada totalizó 7.306 imágenes, con un total de 12.172 defectos, ya que en cada imagen era posible encontrar más de un defecto. En la Tabla 2 se puede observar la cantidad de cada tipo de defecto, así como la división entre imágenes para entrenamiento y validación. La base de datos en cuestión se puede acceder a través del enlace <https://universe.roboflow.com/teste-df3tz/defeitos-em-pavimentos>.
Tabla 2. División de base de datos
| Tipo de defecto | General | Entrenamiento | Validación |
| Bache | 2.604 | 2.090 | 514 |
| Remiendo | 2.256 | 1.799 | 457 |
| Grieta longitudinal | 2.599 | 2.081 | 518 |
| Grieta transversal | 2.318 | 1.853 | 465 |
| Grieta por fatiga | 2.395 | 1.910 | 485 |
| Total | 12.172 | 9.733 | 2.439 |
Después de la construcción de la base de datos, se llevó a cabo el entrenamiento del modelo. La arquitectura utilizada fue YOLOv8x, con configuraciones ya predefinidas, excepto el número de épocas, que fue de 200. La etapa de entrenamiento se realizó a través de Google Colaboratory, un entorno de ejecución de código que proporciona Graphics Processing Unit (GPUs) con alta capacidad de procesamiento. La GPU utilizada fue NVIDIA A100-SXM4-40GB.
Tras el entrenamiento, con el fin de medir el rendimiento del modelo, se obtienen métricas de evaluación. En este trabajo se utilizarán las siguientes: Precisión, Recall, Average Precision (AP) y mean Average Precision (mAP). Para el cálculo de estas métricas se aplican algunos parámetros: Verdadero Positivo (TP-True Positive), Falso Positivo (FP-False Positive) y Falso Negativo (FN-False Negative). El TP ocurre cuando una imagen contiene el objeto de interés y el modelo predice correctamente su ubicación. El FP ocurre cuando la imagen no contiene el objeto de interés, pero el modelo reconoce erróneamente que la imagen contiene el objeto. Por otro lado, el FN ocurre cuando la imagen tiene un objeto de interés y el modelo no identifica su ubicación.
Con estos parámetros, a través de la ecuación 1, es posible calcular cuánto el modelo detectó correctamente los objetos, una métrica conocida como Precisión o Valor Predictivo Positivo.
| (1) |
Dónde: TP = Verdadero Positivo; FP = Falso Positivo.
El cálculo del Recall (también conocido como sensibilidad) se realiza mediante la ecuación 2. Esta métrica mide, entre los objetos detectados, cuántos fueron identificados correctamente.
| (2) |
Dónde: TP = Verdadero Positivo; FN = Falso Negativo.
A partir de estas métricas, es posible obtener el gráfico llamado Precisión-Recall, y con el área debajo de este gráfico se calcula la AP, ecuación 3, que se utiliza para verificar el rendimiento del modelo en una sola clase.
| (3) |
Dónde: P = Precisión; r = Recall.
Finalmente, el mAP consiste en el promedio aritmético de la AP de todas las clases y se obtiene según la ecuación 4. Esta métrica se utiliza para verificar el rendimiento del modelo en todas las clases.
| (4) |
Dónde: mAP= mean Average Precision; N= Número de clases; AP= Average Precision.
Cabe destacar que al final del entrenamiento, YOLOv8 devuelve dos valores de mAP: el mAP@50 y el mAP@50-95. El primero representa el rendimiento del modelo para un umbral de confianza del 50%. El segundo mide el desempeño del modelo para diversos umbrales (entre 50% y 95%).
A continuación, se seleccionó un tramo de carretera de pista simple de la ruta BR-487, en la ciudad de Porto Camargo, Brasil, para probar el modelo entrenado. Para ello, se realizó una filmación utilizando una cámara GoPro Hero 10 Black posicionada en la parte superior de un vehículo de paseo (Figura 3), en un ángulo que solo permitiera visualizar el pavimento.

Figura 3. Posicionamiento de la cámara en el vehículo
Con el objetivo de verificar el desempeño del modelo, el ICM se calculó de dos maneras: la primera se realizó en campo, de forma manual, recorriendo los segmentos de la carretera en un vehículo de paseo a una velocidad media de 40 km/h, cuantificando cada tipo de defecto por kilómetro; la segunda, mediante la filmación del tramo, de forma semiautomática, cuantificando los defectos que el modelo identificó tras el procesamiento.
Cabe destacar que el video fue sometido dos veces al modelo para obtener detecciones con dos umbrales de confianza (50% y 70%). El uso de umbrales es fundamental para evaluar el desempeño del modelo, observando la variación de verdaderos positivos, falsos positivos y falsos negativos, ya que las detecciones por debajo de los porcentajes indicados no son consideradas.
De acuerdo con el DNIT (2022), el ICM consiste en parametrizar la evaluación de la condición de mantenimiento de las carreteras pavimentadas bajo la jurisdicción del DNIT. Para su determinación, se utiliza una fórmula empírica, ecuación 5, en la que el Índice del Pavimento (IP), ecuación 6, representa el 70% del valor, y el Índice de Conservación (IC) representa el 30% restante.
| (5) |
Dónde: ICM = Índice de Condición de Mantenimiento; IP = Índice del Pavimento; IC = Índice de Conservación.
Para la determinación del IP (ec. 6), se evalúa la superficie del pavimento según el número de baches, remiendos y el porcentaje de área agrietada, conforme a la frecuencia de ocurrencia mostrada en la Tabla 3.
| (6) |
Dónde: P(B) = Frecuencia de baches (valor según Tabla 4); P(R) = Frecuencia de remiendos (valor según Tabla 4); P(T) = Frecuencia de grietas (valor según Tabla 4).
Tabla 3. Frecuencia de ocurrencia para elementos de la calzada.
| Defecto | Bajo | Medio | Alto | Unidad |
| Bache | Hasta 2 | 3 a 5 | Más de 5 | Cantidad / km |
| Remiendo | Hasta 2 | 3 a 5 | Más de 5 | Cantidad / km |
| Grietas | T <10% | 10% < T<50% | T >50% | % Área / km |
Fuente. Adaptado de DNIT (2022).
Para la obtención del IC, la evaluación se basa en la altura de la vegetación, la presencia y el estado de los dispositivos de drenaje, y la existencia de señalización horizontal y vertical. En el presente trabajo, solo se consideró la parte relacionada con el pavimento, ya que el objetivo es el reconocimiento de defectos. Por lo tanto, fue necesario encontrar un rango de valores específico para el IP que permitiera clasificar la condición según dicho índice. Así, en la ecuación 6, se emplearon, según la Tabla 4, los valores para la mejor y peor situación posible. Los valores resultantes fueron: 25 (frecuencia baja), 50 (frecuencia media) y 100 (frecuencia alta). Con estos resultados, se propuso la clasificación presentada en la Tabla 5.
Tabla 4. Valores según la frecuencia de ocurrencia.
| Defecto | Bajo | Medio | Alto |
| Bache | 0,25 | 0,50 | 1,00 |
| Remiendo | 0,25 | 0,50 | 1,00 |
| Grieta | 0,25 | 0,50 | 1,00 |
Fuente. Adaptado de DNIT (2022).
Tabla 5. Clasificación de la condición según el IP
| Condición | Rango IP |
| Bueno | IP ≤ 25 |
| Regular | 25< IP< 50 |
| Malo | 50 ≤ IP< 75 |
| Pésimo | IP≥ 75 |
En lo que respecta específicamente al defecto de grietas, es importante destacar que en el análisis del video se consideraron los tres tipos de grietas (longitudinal, transversal y por fatiga) aprendidos por el modelo. El porcentaje de área agrietada se calculó en función de los frames del video, los cuales fueron extraídos mediante el software VLC Media Player. El porcentaje de grietas se calculó utilizando la ecuación 7.
| (7) |
4. RESULTADOS E DISCUSIONES
Tras el entrenamiento del modelo, se obtuvieron las métricas de evaluación: precisión, recall, mAP@50 y mAP@50-95, con valores respectivos de 65,4%, 60,2%, 59,5% y 33,7%. Cabe destacar que, aunque el entrenamiento se realizó durante 200 épocas, los mejores resultados, descritos anteriormente, ocurrieron en la época 136.
En la Figura 4 se puede observar la curva Precision-Recall generada por el modelo. En ella, es evidente que YOLOv8x obtuvo el mejor resultado para el defecto del tipo remiendo, con un AP de 85,9%. La detección de baches y grietas por fatiga también se presentó por encima de la media. No obstante, para las grietas longitudinales y transversales, los valores de AP obtenidos fueron menos representativos.
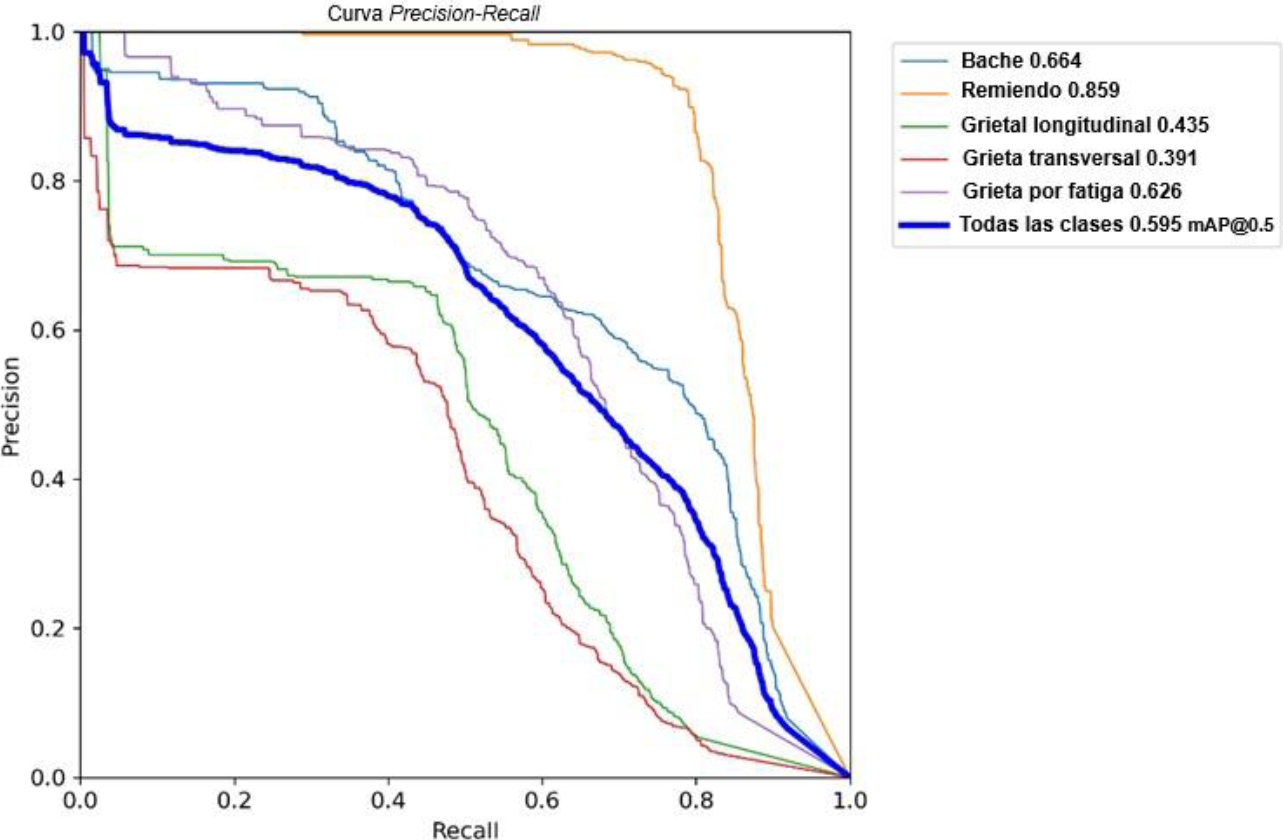
Figura 4. Curva Precision-Recall
A partir de la evaluación en campo y de los dos videos (umbrales del 50% y 70%), se obtuvo la cantidad (registro) y la clase (frecuencia de ocurrencia) de cada uno de los defectos estudiados. La Tabla 6 se refiere al defecto del tipo bache. En ella, se puede observar que, con el umbral del 50%, el modelo obtuvo resultados similares al análisis en campo, con excepción del último tramo (del km 2 al km 1). En cambio, con el umbral del 70%, los resultados fueron insatisfactorios, ya que de los 10 baches presentes en toda la extensión analizada, solo se detectaron dos.
Tabla 6. Evaluación del defecto del tipo bache.
| KM | Campo | Umbral 50% | Umbral 70% | |||
| Registro | Clase | Registro | Clase | Registro | Clase | |
| 4-3 | 4 | Media | 4 | Media | 1 | Baja |
| 3-2 | 2 | Baja | 1 | Baja | 0 | Baja |
| 2-1 | 4 | Media | 2 | Baja | 1 | Baja |
La Tabla 7 muestra la evaluación del defecto del tipo remiendo. En esta tabla se observa que, incluso con el mayor mAP obtenido durante la etapa de entrenamiento, ninguna de las evaluaciones del modelo, en ambos umbrales, coincidió con los resultados obtenidos en campo.
Tabla 7. Evaluación del defecto del tipo remiendo.
| KM | Campo | Umbral 50% | Umbral 70% | |||
| Registro | Clase | Registro | Clase | Registro | Clase | |
| 4-3 | 3 | Media | 6 | Alta | 0 | Baja |
| 3-2 | 4 | Media | 24 | Alta | 11 | Alta |
| 2-1 | 6 | Alta | 0 | Baja | 0 | Baja |
Más allá de la ausencia de detecciones en el tramo del km 2 al km 1, se percibe en la Tabla 7 que se realizaron detecciones adicionales en el umbral del 50% en las demás subdivisiones. Este hecho ocurrió debido a la presencia de falsos positivos, siendo el más significativo la detección de remiendos fuera de la calzada. El aumento del umbral al 70% redujo algunas de estas detecciones erróneas en el tramo del km 3 al km 2; sin embargo, aún se registraron 11 detecciones, como es el caso de la Figura 5, un falso positivo con un 72% de confianza.

Figura 5. Remiendo falso positivo
Para la evaluación de grietas, se elaboró la Tabla 8. A través de esta, es evidente que, aunque el porcentaje de registros es diferente al obtenido en campo, ambas frecuencias del umbral del 50% coincidieron con las obtenidas en campo. Casi lo mismo ocurrió con el umbral del 70%; sin embargo, la clase de este defecto fue considerada baja por el modelo en el tramo del km 3 al km 2.
Tabla 8. Evaluación de grietas
| KM | Campo | Umbral 50% | Umbral 70% | |||
| Registro | Clase | Registro | Clase | Registro | Clase | |
| 4-3 | 45,00% | Media | 29,54% | Media | 11,56% | Media |
| 3-2 | 35,00% | Media | 29,01% | Media | 7,36% | Baja |
| 2-1 | 40,00% | Media | 48,73% | Media | 19,25% | Media |
Finalmente, se realizó el cálculo del IP para verificar la condición del tramo en estudio, cuyos resultados se observan en la Tabla 9.
Tabla 9. Condición del tramo según el IP
| KM | Campo | Umbral 50% | Umbral 70% | |||
| IP | Condición | IP | Condición | IP | Condición | |
| 4-3 | 50,00 | Mala | 65,00 | Mala | 22,50 | Buena |
| 3-2 | 37,50 | Regular | 52,50 | Mala | 35,00 | Mala |
| 2-1 | 65,00 | Mala | 22,50 | Buena | 22,50 | Buena |
Se observa que los análisis en campo indican que el pavimento en cuestión presenta una condición mala en los primeros y últimos kilómetros, mientras que del km 3 al km 2 la condición es regular. En el análisis del video con un umbral del 50%, se nota que solo el tramo del km 4 al 3 fue evaluado de manera similar por el modelo, mientras que los demás tramos difieren de la evaluación en campo. Por otro lado, en el video con un umbral del 70%, aunque uno de los resultados coincidió con la evaluación en campo, este fue precisamente el tramo en el que ocurrieron los remiendos falsos positivos.
5. CONCLUSIÓN
A la luz de lo expuesto, es posible concluir que, aunque los resultados de entrenamiento de la arquitectura YOLOv8 fueron satisfactorios, en la práctica, al utilizarse junto con un índice, el modelo presentó un desempeño por debajo de lo esperado. Los mejores resultados se obtuvieron en la evaluación de baches y grietas con un umbral del 50%.
El desempeño insatisfactorio y la gran presencia de falsos positivos (principalmente en el reconocimiento de remiendos) pueden explicarse por la cantidad de imágenes en la base de datos, la cual se pretende expandir en futuros trabajos, como recomendado por Gonçalves et al. (2023), Huang et al. (2023) y Gong et al. (2023), además del uso de imágenes propias, como defienden Du y Jiao (2022).
Asimismo, se busca verificar en el futuro el desempeño de modelos compactos mencionados por Huang et al. (2023) y Du y Jiao (2022), así como utilizar otras versiones de la arquitectura YOLO para la detección de defectos en pavimentos, incluidas las más recientes YOLOv9 y YOLOv10, desarrolladas por Wang C. et al. (2024) y Wang A. et al. (2024).
6. AGRADECIMIENTOS
Los autores de este artículo agradecen al Departamento Nacional de Infraestructura de Transportes (DNIT), en especial al ingeniero Elcio Guerino Filho y a todo su equipo técnico de la Unidad Local de Campo Mourão, por permitir el uso de la filmación del segmento de la carretera BR-487, y a la Coordinación de Perfeccionamiento de Personal de Nivel Superior (CAPES) por la beca concedida.
7. REFERENCIAS
Chunlong, Z., Peile, H., Shenghuai, W., Chen, W., Hongxia, W. (2024). Pavement Defect Detection Algorithm Based on Improved YOLOv7 Complex Background. IEEE Access, 12, 32870–32880. https://doi.org/10.1109/ACCESS.2024.3370604
Confederação Nacional dos Transportes (CNT). (2023). Pesquisa CNT de Rodovias 2023. Disponível em: https://agenciadenoticias.ms.gov.br/wp-content/uploads/2024/01/pesquisa_cnt_rodovias_2024_relatorio_gerencial.pdf. Accessed on: May 6, 2024.
Departamento Nacional de Infraestrutura de Transportes. (2024). Condições do Pavimento em março/2024. Disponível em: https://servicos.dnit.gov.br/dadosabertos/dataset/condicoes-do-pavimento/resource/030e374d-a505-4d16-a283-610a29008746. Accessed on: May 6, 2024.
Departamento Nacional de Infraestrutura de Transportes. (2024). Resolução nº 5/2022, de 27 de abril de 2022. Disponível em: https://www.gov.br/dnit/pt-br/central-de-conteudos/atos-normativos/tipo/resolucoes/resolucao-5-2022-dir-ba-080-de-29-04-2022.pdf. Accessed on: April 8, 2024.
Du, F. J., Jiao, S. J. (2022). Improvement of Lightweight Convolutional Neural Network Model Based on YOLO Algorithm and Its Research in Pavement Defect Detection. Sensors, 22(9). https://doi.org/10.3390/s22093537
Ju, R. Y., Cai, W. (2023). Fracture detection in pediatric wrist trauma X-ray images using YOLOv8 algorithm. Scientific Reports, 13(1). https://doi.org/10.1038/s41598-023-47460-7
El Hakea, A. H., Fakhr, M. W. (2023). Recent computer vision applications for pavement distress and condition assessment. In Automation in Construction (Vol. 146). Elsevier B.V. https://doi.org/10.1016/j.autcon.2022.104664
Gonçalves, M., Marques, T., Gaspar, P. D., Soares, V. N. G. J., Caldeira, J. M. L. P. (2023). Road Pavement Damage Detection using Computer Vision Techniques: Approaches, Challenges and Opportunities. Revista de Informatica Teorica e Aplicada, 30(2), 22–35. https://doi.org/10.22456/2175-2745.129787
Gong, H., Tešić, J., Tao, J., Luo, X., Wang, F. (2023). Automated Pavement Crack Detection with Deep Learning Methods: What Are the Main Factors and How to Improve the Performance? In Transportation Research Record (Vol. 2677, Issue 10, pp. 311–323). SAGE Publications Ltd. https://doi.org/10.1177/03611981231161358
Huang, P., Wang, S., Chen, J., Li, W., Peng, X. (2023). Lightweight Model for Pavement Defect Detection Based on Improved YOLOv7. Sensors, 23(16). https://doi.org/10.3390/s23167112
Hussain, M. (2023). YOLO-v1 to YOLO-v8, the Rise of YOLO and Its Complementary Nature toward Digital Manufacturing and Industrial Defect Detection. In Machines (Vol. 11, Issue 7). Multidisciplinary Digital Publishing Institute (MDPI). https://doi.org/10.3390/machines11070677
Lin, Y. C., Chen, W. H., Kuo, C. H. (2021). Implementation of pavement defect detection system on edge computing platform. Applied Sciences (Switzerland), 11(8). https://doi.org/10.3390/app11083725
Lu, J., Behbood, V., Hao, P., Zuo, H., Xue, S., Zhang, G. (2015). Transfer learning using computational intelligence: A survey. Knowledge-Based Systems, 80, 14–23. https://doi.org/10.1016/j.knosys.2015.01.010
Ma, D., Fang, H., Wang, N., Zhang, C., Dong, J., Hu, H. (2022). Automatic Detection and Counting System for Pavement Cracks Based on PCGAN and YOLO-MF. IEEE Transactions on Intelligent Transportation Systems, 23(11), 22166–22178. https://doi.org/10.1109/TITS.2022.3161960
Pan, Y., Zhang, L. (2021). Roles of artificial intelligence in construction engineering and management: A critical review and future trends. In Automation in Construction (Vol. 122). Elsevier B.V. https://doi.org/10.1016/j.autcon.2020.103517
Terven, J., Córdova-Esparza, D. M., Romero-González, J. A. (2023). A Comprehensive Review of YOLO Architectures in Computer Vision: From YOLOv1 to YOLOv8 and YOLO-NAS. In Machine Learning and Knowledge Extraction (Vol. 5, Issue 4, pp. 1680–1716). Multidisciplinary Digital Publishing Institute (MDPI). https://doi.org/10.3390/make5040083
Wang, A., Chen, H., Liu, L., Chen, K., Lin, Z., Han, J., Ding, G. (2024). YOLOv10: Real-Time End-to-End Object Detection. http://arxiv.org/abs/2405.14458
Wang, C.-Y., Yeh, I.-H., Liao, H.-Y. M. (2024). YOLOv9: Learning What You Want to Learn Using Programmable Gradient Information. http://arxiv.org/abs/2402.13616
Yao, H., Fan, Y., Wei, X., Liu, Y., Cao, D., You, Z. (2024). Research and optimization of YOLO-based method for automatic pavement defect detection. Electronic Research Archive, 32(3), 1708–1730. https://doi.org/10.3934/ERA.2024078
Zhao, Z. Q., Zheng, P., Xu, S. T., Wu, X. (2019). Object Detection with Deep Learning: A Review. In IEEE Transactions on Neural Networks and Learning Systems (Vol. 30, Issue 11, pp. 3212–3232). Institute of Electrical and Electronics Engineers Inc. https://doi.org/10.1109/TNNLS.2018.2876865