![]()
| Study Case | https://doi.org/10.21041/ra.v15i1.781 |
Detecção de defeitos utilizando YOLOv8 para determinação da condição de pavimentos asfálticos
Defect detection using YOLOv8 for determining the condition of asphalt pavements
Detección de defectos con YOLOv8 para determinar el estado de los pavimentos asfálticos
A. M. Souza1* , C. E. Oliveira1, P. H. B. Decker1, A. L. S. C. Correa1, G. E. R. Amorim1, H. B. Fontenele1
, C. E. Oliveira1, P. H. B. Decker1, A. L. S. C. Correa1, G. E. R. Amorim1, H. B. Fontenele1
1 Department of Civil Construction, State University of Londrina, Londrina, Brazil.
*Autor de contato: atilamarconcine@gmail.com
Recebido: 19/09/2024
Revisado: 19/11/2024
Aceito: 10/12/2024
Publicado: 01/01/2025
| Citar como: Souza, A. M., Oliveira, C. E., Decker, P. H. B., Amorim, G. E. R., Correa, A. L. S. C, Fontenele, H. B. (2025), “Defect detection using YOLOv8 for determining the condition of asphalt pavements.”, Revista ALCONPAT, 15 (1), pp. 79 – 91, DOI: https://doi.org/10.21041/ra.v15i1.781 |
Resumo
Este trabalho objetivou avaliar a capacidade de detecção de buracos, remendos e trincas, por meio do algoritmo YOLOv8. Para isso, realizou-se uma filmagem do trecho de uma rodovia, que foi avaliada em campo, de forma manual e comparada com uma avaliação semiautomática a partir do processamento do vídeo pelo modelo. A utilização do modelo produz vários resultados diferentes dos obtidos por meio da avaliação em campo. Apesar de ser empregado apenas uma parcela do Índice de Condição de Manutenção na avaliação, é a primeira vez que um índice é utilizado em conjunto com o YOLOv8. Dessa forma, conclui-se que o modelo requer melhorias para se tornar viável e ser aplicado em definitivo.
Palavras-chave: automação; algoritmo; imagem; visão computacional; detecção de objetos.
1. INTRODUÇÃO
No Brasil o principal modo de transporte tanto para deslocamento de pessoas quanto de cargas é o rodoviário. De acordo com dados do Sistema Nacional de Viação (SNV) a malha rodoviária do país se estende por cerca de 1,7 milhões de quilômetros, dos quais somente 213,5 km encontram-se pavimentados. Da extensão pavimentada, a chamada Pesquisa CNT de Rodovias, em sua versão de 2023, avaliou 111.502 km, cerca de 52% do total, a partir de uma gama de indicadores, relacionados desde as condições do pavimento propriamente ditas, até a presença de sinalização e geometria das vias, concluindo que somente cerca de 32,5% encontram-se em estado ótimo ou bom, enquanto 26,1% encontravam-se em estado ruim ou péssimo (CNT, 2023).
Também no sentido de avaliar a condição das rodovias brasileiras, em específico das federais, o Departamento Nacional de Infraestrutura de Transportes (DNIT) disponibiliza mensalmente dados relativos ao chamado Índice de Condição da Manutenção (ICM), a partir do qual é possível classificar as condições das vias. Este método será discutido e aplicado adiante neste trabalho. De acordo com a versão de março de 2024, dos aproximadamente 65.800 km das rodovias federais pavimentadas, há disponibilizados dados relativos ao ICM de trechos que somam extensão de 49.500 km, dos quais 77,7% foram classificados como bons, 15% regulares, e 7,3% ruins ou péssimos (DNIT, 2024). Sendo assim, não há dados disponíveis para cerca de 25% da malha federal pavimentada, enquanto a lacuna de dados é ainda mais crítica para as rodovias pavimentadas estaduais, bem como para as não pavimentadas (CNT, 2023). Dessa forma, avaliar a qualidade dos pavimentos é de grande relevância, e se constitui em lacuna significativa no contexto nacional. Lin, Chen e Kuo (2021) mencionam que defeitos na superfície das estradas, como buracos e remendos, trazem grande risco aos usuários das vias: além de causar danos à suspensão dos veículos, têm grande influência na ocorrência de acidentes.
A realização de levantamento e verificação das condições do pavimento é fundamental para avaliar suas situações atuais e prever tendências de comportamento futuro, e se constitui em desafio significativo no país, dada sua extensa malha rodoviária. Para Gong et al. (2023) essas avaliações são importantes para determinar prioridades de intervenção e para auxiliar na escolha dos métodos de manutenção e reabilitação, fundamentais aos Sistemas de Gerência de Pavimentos.
Considerando que a inspeção visual de defeitos no pavimento consiste num processo complexo e pouco eficiente, que demanda de elevada quantidade de mão de obra, Chunlong et al. (2024) menciona que o uso de novas tecnologias na captação de imagens, alinhado com técnicas computacionais relacionadas à inteligência artificial, mais precisamente ao aprendizado profundo, são capazes de fornecer suporte técnico para a coleta e o reconhecimento de imagens de defeitos nos pavimentos.
Um algoritmo de destaque na literatura relacionada ao tema é o You Only Look Once (YOLO), uma ferramenta de detecção de objetos em imagens baseado na teoria da aprendizagem profunda (Du e Jiao, 2022). De acordo com Lu et al. (2015) e Zhao et al. (2019) esse modelo explora os dados de diferentes amostras por meio de uma estrutura de rede neural convolucional, o que o torna eficiente para a detecção de objetos complexos, como os defeitos nas estradas.
Nesse ensejo, esta pesquisa teve como objetivo, avaliar a capacidade de identificação de defeitos de diferentes tipos (buracos, remendos e trincas), a partir da filmagem de um trecho de rodovia com sinais evidentes de deterioração. Para tanto, utilizou-se o algoritmo de detecção de objetos YOLOv8, por meio do ambiente de execução Google Colab. Além disso, visando testar o modelo, comparou-se o ICM calculado de forma manual (com os dados obtidos em campo) e de forma semiautomática (com uso das informações provenientes do processamento da filmagem pelo modelo).
2. REVISÃO BIBLIOGRÁFICA
Diante da importância dos pavimentos como infraestruturas de transporte, e tendo em vista a vasta gama de defeitos aos quais suas estruturas estão suscetíveis, o uso de tecnologias computacionais como ferramentas para auxiliarem no gerenciamento dos pavimentos surge como uma alternativa que visa prover, sobretudo, agilidade nas análises de campo (Pan e Zhang, 2021). Conforme El Hakea e Fakhhr (2023) as potencialidades no uso destas ferramentas se dão, por exemplo, na classificação, detecção (mapeamento), segmentação e quantificação dos defeitos, além de possibilitar a avaliação das condições de desgaste dos pavimentos.
Embora o processo de detecção tradicional de defeitos em pavimentos por visão artificial tenha surgido com um processo complexo e trabalhoso, com baixa eficiência, Huang et al. (2023) mencionam que os avanços nas tecnologias de detecção de imagem e nos dispositivos de aprendizagem computacional profunda têm oferecido maior suporte técnico para a coleta de imagens e o reconhecimento dos defeitos nos pavimentos.
A detecção de objetos ao longo dos anos vem se mostrando um componente crítico em diferentes áreas. Existem diversos algoritmos que realizam essa atividade de visão computacional, na qual, segundo Terven et al. (2023), o YOLO se destaca devido a sua velocidade e precisão na identificação de objetos em imagens. A primeira versão desse algoritmo surgiu no ano de 2015, e desde então várias outras versões vem sendo desenvolvidas com base na sua arquitetura. Hussain (2023) e Terven et al. (2023) comentam que no ano de 2023 a empresa Ultralytics (que também lançaram a YOLOv5) anunciou a YOLOv8, que apresenta uma série de novidades em relação as arquiteturas anteriores.
A Figura 1 ilustra a arquitetura do YOLOv8, dividida em 3 partes: BackBone, Neck e Head. O BackBone é composto por diversas camadas convolucionais, sendo responsável por extrair as características da imagem recebida (Input). Estas, por sua vez, são combinadas no Neck, onde são gerados três feature maps, para objetos grandes, médios e pequenos, respectivamente. Por fim, na Head, as detecções são efetuadas de forma separada, sendo combinadas em seguida para gerar a imagem de saída (Output), que contém a localização do objeto em conjunto com confiabilidade, por meio de uma bounding box. (Ju e Cai, 2023; Terven et al., 2023).
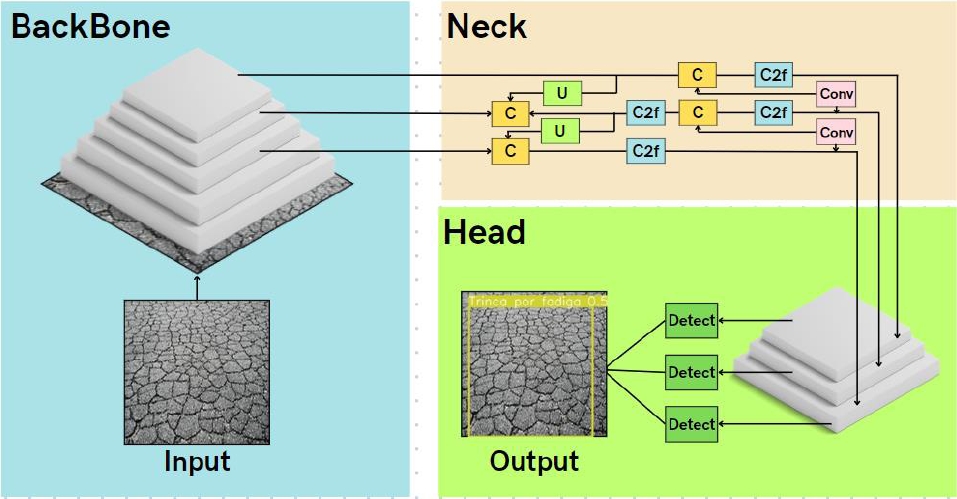
Figura 1. Arquitetura do YOLOv8
Em virtude da importância e das potencialidades da ferramenta, e considerando esta constante evolução do algoritmo, diversos trabalhos vem sendo realizados com o YOLO nos últimos anos, buscando expandir a variação de defeitos a serem identificados, bem como ampliar a eficiência da tecnologia (Du e Jiao, 2022). Dentre estes trabalhos, pode-se mencionar: Lin et al. (2021), que usaram o YOLOv3 para a detecção de defeitos em geral nos pavimentos de Taiwan; Ma et al. (2022) e Gong et al. (2023), adotaram o método de detecção automatizadas para identificar fissuras, respectivamente a partir de versão adaptada do YOLOv3, e do YOLOv2; Souza et al. (2023), que usaram a versão YOLOv4 para a identificação de buracos; Huang et al. (2023), que desenvolveram um modelo compacto para a detecção dos defeitos com base no YOLOv7; Gonçalves et al. (2023), que conduziram revisão bibliográfica e apresentaram estado da arte acerca do uso de visão computacional para detecção de defeitos de pavimento, portanto revisaram algoritmos diversos aplicados por outros autores; Chunlong et al. (2024), que utilizaram um contexto aprimorado do YOLOv7 para a identificação de diversos tipos de trincas, e Yao et al. (2024), que propuseram um sistema de otimização do método baseado em YOLOv7 para detecção automática de trincas e buracos em pavimentos.
Em continuidade, na Tabela 1 são apresentadas informações relativas à versão do modelo YOLO adotada (ou revisada), o tipo de pavimento estudado, bem como os defeitos considerados em cada trabalho.
Tabela 1. Versão do YOLO, tipo de pavimento e defeitos estudados
| Autor | Ano | Modelo YOLO | Tipo de pavimento | Defeitos estudados |
| Chunlong Z. et al. | 2024 | YOLOv7 | Asfalto | Trincas transversais, Trincas Longitudinais e Trincas por Fadiga |
| Yao H. et al. | 2024 | YOLOv7 e YOLOv5 | Asfalto e concreto | Trincas transversais, Trincas Longitudinais e Trincas por Fadiga e buracos |
| Gonçalves M. et al. | 2023 | Diversos | Diversos | Diversos |
| Huang P. et al. | 2023 | YOLOv7 | Asfalto | Buracos, Remendos, Trincas |
| Gong H. et al. | 2023 | YOLOv2 | Não especificado | Trincas transversais, Trincas Longitudinais e Trincas por Fadiga e buracos |
| Du F.; Jiao S. | 2022 | YOLOv5s | Asfalto | Trincas transversais, Trincas Longitudinais e Trincas por Fadiga e buracos |
| Ma D. et al. | 2022 | YOLO-MF (baseado no YOLOv3) | Concreto | Trincas em geral |
| Lin Y. et al. | 2021 | YOLOv3 | Não especificado | Trincas, buracos e remendos |
De forma geral, cada trabalho apresenta pequenos pontos para possíveis melhorias nos sistemas de visão computacional, no contexto de extração de defeitos. Chulong et al. (2024), por exemplo, introduzem novos algoritmos de clusterização de frames, bem como novo módulo para agrupamento. Yao et al. (2024) compararam modelos baseados na versão YOLOv7 com modelo otimizado oriundo do YOLOv5 e, além de terem obtido desempenho superior, isso se deu às custas de seis vezes mais parâmetros, e com velocidade de processamento três vezes menor.
Ainda assim, Ma et al. (2022), Yao et al. (2024) e Chunlong et al. (2024) apontam lacunas no desenvolvimento de métodos de detecção de defeitos em pavimentos, em especial para condições de fundo e iluminação complexas, ou ainda em condições climáticas adversas. Huang et al. (2023) e Du e Jiao (2022) propõe algoritmos compactos, que visam melhorar ou manter a acurácia na extração de defeitos em pavimentos, enquanto se reduz a demanda computacional para sua aplicação.
A partir de revisão de diversos trabalhos, Gonçalves et al. (2023) buscaram avaliar a eficácia na utilização de bancos de dados de imagens disponíveis online para treinamento profundo, e para tanto identificaram trabalhos que adotaram desde 200 imagens como base de dados, até outros que usaram mais de 18.000. Para os autores, fica clara a necessidade de melhorar a qualidade dos bancos de dados disponíveis. Apontam, ainda, a tendência de melhora dos resultados obtidos, quando da utilização de mais imagens de referência no treinamento dos modelos. Tais conclusões estão de acordo com o defendido por Huang et al. (2023) e Gong et al. (2023).
Neste ensejo, Du e Jiao (2022) se preocuparam com a falta de confiança na qualidade de bancos de dados abertos, por conta de inconsistências em relação a fatores como ângulo de filmagem, intensidade de luz e claridade, tendo preferido desenvolver dados próprios. Em tempo, os autores propõe melhorias a dados existentes, inclusive por meio de plataformas como o Baidu Street View, análogo ao mais popular no Brasil Google Street View.
3. MATERIAIS E MÉTODOS
A metodologia deste trabalho foi dividida em quatro etapas, conforme ilustrado na Figura 2, sendo elas, em ordem: montagem do banco de dados, treinamento do modelo YOLOv8, filmagem de uma via utilizando uma GoPro Hero 10 Black para teste do modelo e cálculo do Índice do Pavimento (IP) que é parte integrante do cálculo para determinar o Índice de Condição da Manutenção (ICM).

Figura 2. Etapas da metodologia
Para a montagem do banco de dados foi utilizado o site RoboFlow Universe. Através dele, foi possível efetuar o download de bancos de imagens públicos de forma gratuita. Dentre as imagens disponíveis para uso, foram encontrados diversos tipos de defeitos presentes na superfície de pavimentos, dos quais se selecionaram cinco para ser o objeto de estudo, sendo eles: Buraco, Remendo, Trinca por Fadiga, Trinca Longitudinal e Trinca Transversal.
O banco de imagens confeccionado totalizou 7.306 imagens, com a presença de 12.172 defeitos, uma vez que em cada imagem era possível haver mais de um defeito. Na Tabela 2, é possível observar a quantidade de cada tipo de defeito, bem como a divisão entre imagens para treinamento e validação. O banco de imagens em questão pode ser acessado através do link <https://universe.roboflow.com/teste-df3tz/defeitos-em-pavimentos>.
Tabela 2. Divisão do banco de dados
| Tipo de defeito | Geral | Treinamento | Validação |
| Buraco | 2.604 | 2.090 | 514 |
| Remendo | 2.256 | 1.799 | 457 |
| Trinca Longitudinal | 2.599 | 2.081 | 518 |
| Trinca Transversal | 2.318 | 1.853 | 465 |
| Trinca por fadiga | 2.395 | 1.910 | 485 |
| Total | 12.172 | 9.733 | 2.439 |
Após a construção do banco de dados, foi efetuado o treinamento do modelo. A arquitetura utilizada foi a YOLOv8x, com as configurações já predefinidas, exceto o número de épocas, o qual foi utilizado 200. A etapa de treinamento foi realizada através do Google Colaboratory, um ambiente de execução de código que fornece Graphics Processing Unit (GPUs) de alta capacidade de processamento. A GPU utilizada foi a NVIDIA A100-SXM4-40GB.
Após o treinamento, com a finalidade de mensurar a performance do modelo, são obtidas métricas de avaliação, neste trabalho serão utilizadas: Precisão, Recall, Average Precision (AP) e mean Average Precision (mAP). Para o cálculo dessas métricas são aplicados alguns parâmetros, sendo eles: Verdadeiro Positivo (TP-True Positive), Falso Positivo (FP-False Positive) e Falso Negativo (FN-False Negative). O TP ocorre quando uma imagem contém o objeto de interesse e o modelo prevê corretamente a sua localização. O FP ocorre quando a imagem não contém o objeto de interesse, mas o modelo reconhece de forma errônea que a imagem contém o objeto. Já o FN acontece quando a imagem tem um objeto de interesse e o modelo não identifica a sua localização.
Com esses parâmetros, através da equação 1, é possível calcular o quanto o modelo detectou objetos corretamente, métrica conhecida como Precisão, ou Valor Preditivo Positivo.
| (1) |
Onde: TP = Verdadeiro Positivo; FP = Falso Positivo.
O cálculo do Recall (também conhecido como sensibilidade) é efetuado por meio da equação 2, essa métrica mensura, dentre os objetos detectados, quantos foram identificados de forma correta.
| (2) |
Onde: TP = Verdadeiro Positivo; FN = Falso Negativo.
Através dessas métricas é possível obter o gráfico chamado Precisão-Recall, e com a área abaixo desse gráfico é calculado a AP, equação 3, usada para verificar o desempenho do modelo para uma única classe.
| (3) |
Onde: P = Precisão; r = Recall.
Por fim, mAP, consiste na média aritmética da AP de todas as classes e é obtida, conforme a equação 4, sendo utilizada para verificar o desempenho do modelo em todas as classes.
| (4) |
Onde: mAP= mean Average Precision; N= Número de classes; AP= Average Precision.
Ressalta-se que ao final do treinamento o YOLOv8 retorna dois valores de mAP, o mAP@50 e o mAP@50-95. O primeiro consiste no desempenho do modelo para um limiar de confiança de 50%. Já o segundo, mensura a performance do modelo para variados limiares (entre 50% e 95%).
Na sequência, selecionou-se um trecho de pista simples da rodovia BR-487, na cidade de Porto Camargo/PR, para testar o modelo treinado. Para isso, foi realizada filmagem utilizando uma câmera GoPro Hero 10 Black posicionada na parte superior de um veículo de passeio (Figura 3), em um ângulo que fosse visualizado apenas o pavimento.

Figura 3. Posicionamento da câmera no veículo
Com o intuito de verificar a performance do modelo o ICM foi calculado de duas formas: a primeira foi efetuada em campo, de forma manual, na qual que se percorreu os segmentos da rodovia a bordo de um veículo de passeio com uma velocidade média de 40 km/h, quantificando cada tipo de defeito por quilômetro; a segunda, através da filmagem do trecho, de forma semiautomática, quantificando os defeitos que o modelo identificou após processamento.
Salienta-se que o vídeo foi submetido duas vezes ao modelo, para obtenção de detecções em dois limiares de confiança (50% e 70%). A utilização de limiares é fundamental para avaliar a performance do modelo, observando a variação de verdadeiros positivos, falsos positivos e falsos negativos, uma vez que a detecções abaixo das porcentagens indicadas não são consideradas.
Conforme DNIT (2022), o ICM consiste em parametrizar a avaliação da condição de manutenção das rodovias pavimentadas que estão sob jurisdição do DNIT, para a determinação do índice é utilizado uma fórmula empírica, equação 5, em que o Índice do Pavimento (IP), equação 6, representa 70% do valor e o Índice de Conservação (IC) representa os 30% restantes.
| (5) |
Onde: ICM = Índice da Condição de manutenção; IP = Índice do Pavimento; IC = Índice da Conservação.
Para a determinação do IP (eq. 6), é avaliado a superfície do pavimento pelo número de buracos, de remendos, e pelo percentual de área trincada, conforme frequência de ocorrência mostrada na Tabela 3.
| (6) |
Onde: P(B) = Frequência de buracos (valor conforme Tabela 4); P(R) = Frequência de remendos (valor conforme Tabela 4); P(T) = Frequência de trincamentos (valor conforme Tabela 4).
Tabela 3. Frequência de ocorrência para elementos de pista de rolamento.
| Defeito | Baixo | Médio | Alto | Unidade |
| Buraco | Até 2 | 3 a 5 | Maior que 5 | Quantidade / Km |
| Remendo | Até 2 | 3 a 5 | Maior que 5 | Quantidade / Km |
| Trincamento | T <10% | 10% < T<50% | T >50% | % Área / Km |
Fonte. Adaptado de DNIT (2022).
Já para a obtenção do IC, a avaliação é baseada na altura da vegetação, presença e condição dos dispositivos de drenagem e presença de dispositivos de sinalização horizontal e vertical. Para o presente trabalho foi considerado apenas a parcela do pavimento, uma vez que o objetivo é o reconhecimento de defeitos. Assim, foi necessário encontrar uma faixa de valores específica para o IP que permitisse classificar a condição a partir de tal índice. Dessa forma, na equação 6, foram empregados, de acordo com a Tabela 4, os valores para melhor e pior situação possível. Os valores resultantes foram: 25 (frequência baixa), 50 (frequência média) e 100 frequência alta). De posse desse resultado, propôs-se a faixa de classificação apresentada na Tabela 5.
Tabela 4. Valores a serem utilizados de acordo com a frequência de ocorrência.
| Defeito | Baixo | Médio | Alto |
| Buraco | 0,25 | 0,50 | 1,00 |
| Remendo | 0,25 | 0,50 | 1,00 |
| Trincamento | 0,25 | 0,50 | 1,00 |
Fonte. Adaptado de DNIT (2022).
Tabela 5. Classificação da Condição através do IP
| Condição | Faixa IP |
| Bom | IP ≤ 25 |
| Regular | 25< IP< 50 |
| Ruim | 50 ≤ IP< 75 |
| Péssimo | IP≥ 75 |
Com relação especificamente ao defeito trincamento, é importante destacar que na análise do vídeo foram considerados todos os três tipos de trincas (longitudinal, transversal e por fadiga) aprendidas pelo modelo e a porcentagem de área trincada foi calculada em função dos frames dos vídeos, onde eles foram extraídos através do software VLC Media Player. A porcentagem do trincamento foi então calculada por meio da equação 7.
| (7) |
4. RESULTADOS E DISCUSSÕES
Após o treinamento do modelo, foi possível obter as métricas de avaliação precisão, recall, mAP@50 e mAP@50-95, sendo elas respectivamente, 65,4%, 60,2%, 59,5% e 33,7%. Ressalta-se que, apesar do treinamento ter sido realizado por 200 épocas, os melhores resultados, descritos acima, ocorreram na época 136.
Na Figura 4 é possível observar a curva Precision-Recall gerada pelo modelo. Nela, é perceptível que a YOLOv8x obteve o melhor resultado para o defeito do tipo remendo, com 85,9% de AP. A detecção de buracos e de trincas por fadiga também se apresentam acima da média. Já para as trincas longitudinais e transversais, nota-se que os valores de AP obtidos foram menos expressivos.
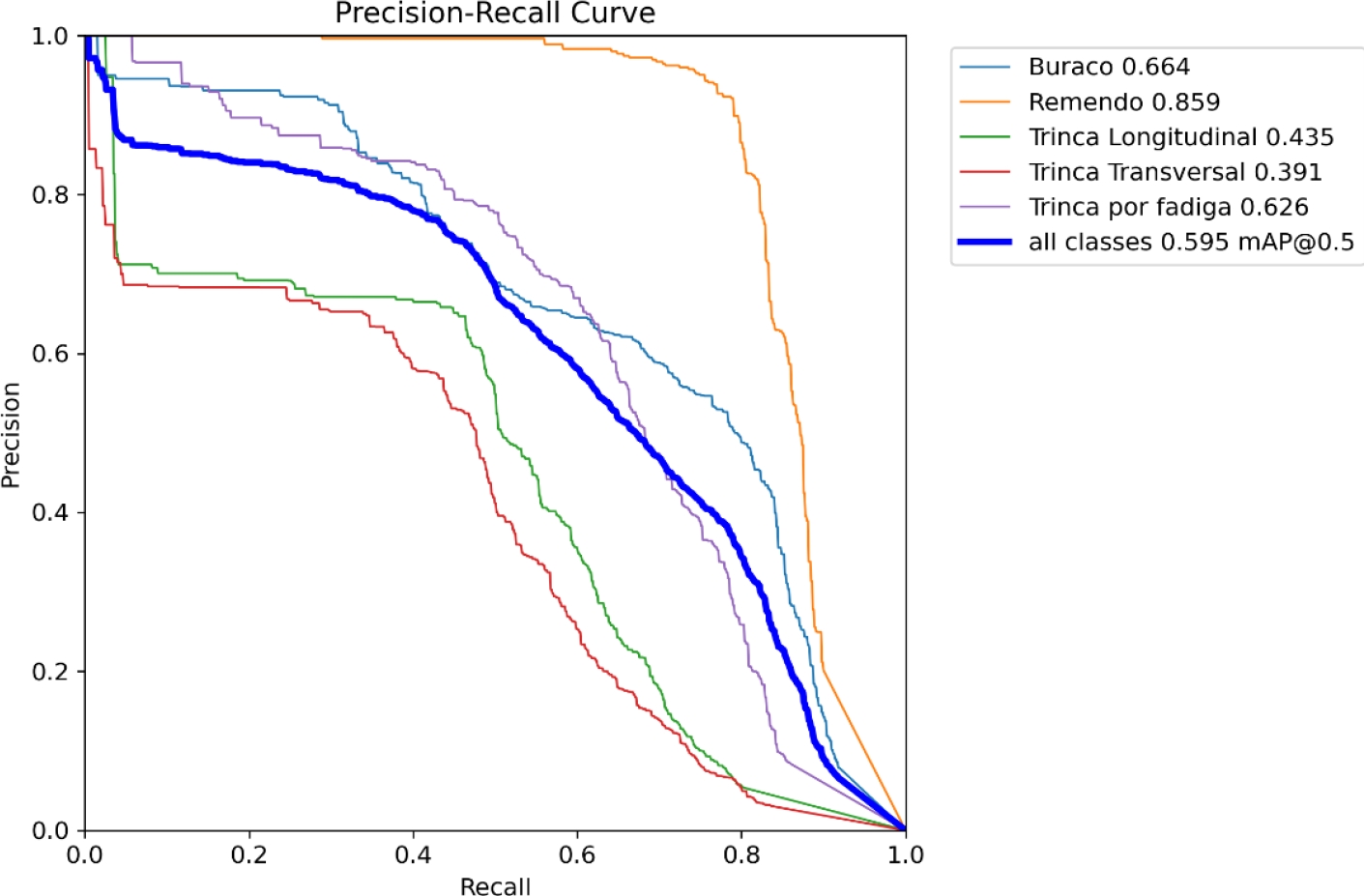
Figura 4. Curva Precison-Recall
A partir da avaliação em campo e dos dois vídeos (limiar 50% e 70%) obtiveram-se a quantidade (registro) e a classe (frequência de ocorrência) de cada um dos defeitos estudados. A Tabela 6 se refere ao defeito do tipo buraco. Nela, é possível observar que, no limiar de 50%, o modelo obteve resultados similares a análise em campo, com exceção da última parte do trecho (do km 2 ao km 1). Já no limiar 70%, os resultados foram insatisfatórios, onde, dos 10 buracos presentes em toda a extensão analisada, apenas dois foram detectados.
Tabela 6. Avaliação do defeito do tipo buraco.
| KM | Campo | Limiar 50% | Limiar 70% | |||
| Registro | Classe | Registro | Classe | Registro | Classe | |
| 4-3 | 4 | Média | 4 | Média | 1 | Baixa |
| 3-2 | 2 | Baixa | 1 | Baixa | 0 | Baixa |
| 2-1 | 4 | Média | 2 | Baixa | 1 | Baixa |
Na Tabela 7 consta a avaliação do defeito do tipo remendo. Através da tabela em questão, percebe-se que mesmo com o maior mAP obtido na etapa de treinamento, nenhuma das avaliações do modelo, em ambos os limiares, coincidiu com a realizada em campo.
Tabela 7. Avaliação do defeito do tipo remendo.
| KM | Campo | Limiar 50% | Limiar 70% | |||
| Registro | Classe | Registro | Classe | Registro | Classe | |
| 4-3 | 3 | Média | 6 | Alta | 0 | Baixa |
| 3-2 | 4 | Média | 24 | Alta | 11 | Alta |
| 2-1 | 6 | Alta | 0 | Baixa | 0 | Baixa |
Para além da ausência de detecções do km 2 ao km 1, percebe-se na Tabela 7 que detecções a mais foram realizadas no limiar 50% nas demais subdivisões. Esse fato ocorreu pela presença de falsos positivos, sendo o mais significativo a detecção de remendo fora da pista. O aumento de limiar para 70% reduziu algumas dessas detecções errôneas do km 3 ao km 2, contudo, 11 ainda permaneceram, como é o caso da Figura 5, um falso positivo que apresenta 72% de confiança.

Figura 5. Remendo falso positivo
Já para a avaliação de Trincamentos, foi elaborada a Tabela 8. Através dela é perceptível que mesmo que a porcentagem de registro seja diferente da obtida em campo, ambas as frequências do limiar 50% coincidiram com as de campo. O mesmo quase ocorreu no limiar 70%, contudo a classe desse defeito foi considerada baixa pelo modelo do km 3 ao km 2.
Tabela 8. Avaliação do trincamento
| KM | Campo | Limiar 50% | Limiar 70% | |||
| Registro | Classe | Registro | Classe | Registro | Classe | |
| 4-3 | 45,00% | Média | 29,54% | Média | 11,56% | Média |
| 3-2 | 35,00% | Média | 29,01% | Média | 7,36% | Baixa |
| 2-1 | 40,00% | Média | 48,73% | Média | 19,25% | Média |
Por fim, foi realizado o cálculo do IP, para verificar a condição do trecho em estudo, resultado que pode ser observado na Tabela 9.
Tabela 9. Condição do trecho conforme o IP
| KM | Campo | Limiar 50% | Limiar 70% | |||
| IP | Condição | IP | Condição | IP | Condição | |
| 4-3 | 50,00 | Ruim | 65,00 | Ruim | 22,50 | Bom |
| 3-2 | 37,50 | Regular | 52,50 | Ruim | 35,00 | Regular |
| 2-1 | 65,00 | Ruim | 22,50 | Bom | 22,50 | Bom |
Observa-se que as análises em campo demonstram que o pavimento em questão apresenta a condição ruim nos primeiros e últimos quilômetros, já no km 3 ao 2, a condição é regular. Na análise do vídeo com limiar de 50%, nota-se que apenas o km 4 ao 3 foi avaliado de forma similar pelo modelo, enquanto os demais se diferem da avaliação em campo. Já no vídeo com limiar de 70%, apesar de um dos resultados coincidirem com a avaliação em campo, foi justamente o trecho em que ocorreram os remendos falsos positivos.
5. CONCLUSÃO
Perante o exposto, é possível concluir que apesar dos resultados satisfatórios de treinamento da arquitetura YOLOv8, na prática, quando utilizado em conjunto com um índice, o modelo apresentou um desempenho abaixo do esperado, onde, os melhores resultados ocorreram na avaliação de buracos e trincamentos no limiar de 50%.
O desempenho insatisfatório e a grande presença de falsos positivos (principalmente no reconhecimento de remendos), pode ser explicado pela quantidade de imagens do banco de dados, o qual almeja-se expandir em futuro trabalhos, conforme recomendado por Gonçalves et al. (2023), Huang et al. (2023) e Gong et al. (2023), além da utilização de imagens próprias, conforme defendido por Du e Jiao (2022).
Além disso visa-se verificar futuramente o desempenho de modelos compactos mencionados por Huang et al. (2023) e Du e Jiao (2022), bem como utilizar outras versões da arquitetura YOLO na detecção de defeitos em pavimentos, dentre elas as mais recentes YOLOv9 e YOLOv10, desenvolvida por Wang C. et al. (2024) e Wang A. et al. (2024).
6. AGRADECIMENTOS
Os autores deste artigo agradecem ao Departamento Nacional de Infraestrutura de Transportes (DNIT), em especial ao engenheiro Elcio Guerino Filho e toda sua equipe técnica da Unidade Local de Campo Mourão, por permitirem o uso da filmagem do segmento da rodovia BR-487 e a Coordenação de Aperfeiçoamento de Pessoal de Nível Superior (CAPES) pela bolsa concedida.
7. REFERÊNCIAS
Chunlong, Z., Peile, H., Shenghuai, W., Chen, W., Hongxia, W. (2024). Pavement Defect Detection Algorithm Based on Improved YOLOv7 Complex Background. IEEE Access, 12, 32870–32880. https://doi.org/10.1109/ACCESS.2024.3370604
Confederação Nacional dos Transportes (CNT). (2023). Pesquisa CNT de Rodovias 2023. Disponível em: https://agenciadenoticias.ms.gov.br/wp-content/uploads/2024/01/pesquisa_cnt_rodovias_2024_relatorio_gerencial.pdf. Accessed on: May 6, 2024.
Departamento Nacional de Infraestrutura de Transportes. (2024). Condições do Pavimento em março/2024. Disponível em: https://servicos.dnit.gov.br/dadosabertos/dataset/condicoes-do-pavimento/resource/030e374d-a505-4d16-a283-610a29008746. Accessed on: May 6, 2024.
Departamento Nacional de Infraestrutura de Transportes. (2024). Resolução nº 5/2022, de 27 de abril de 2022. Disponível em: https://www.gov.br/dnit/pt-br/central-de-conteudos/atos-normativos/tipo/resolucoes/resolucao-5-2022-dir-ba-080-de-29-04-2022.pdf. Accessed on: April 8, 2024.
Du, F. J., Jiao, S. J. (2022). Improvement of Lightweight Convolutional Neural Network Model Based on YOLO Algorithm and Its Research in Pavement Defect Detection. Sensors, 22(9). https://doi.org/10.3390/s22093537
Ju, R. Y., Cai, W. (2023). Fracture detection in pediatric wrist trauma X-ray images using YOLOv8 algorithm. Scientific Reports, 13(1). https://doi.org/10.1038/s41598-023-47460-7
El Hakea, A. H., Fakhr, M. W. (2023). Recent computer vision applications for pavement distress and condition assessment. In Automation in Construction (Vol. 146). Elsevier B.V. https://doi.org/10.1016/j.autcon.2022.104664
Gonçalves, M., Marques, T., Gaspar, P. D., Soares, V. N. G. J., Caldeira, J. M. L. P. (2023). Road Pavement Damage Detection using Computer Vision Techniques: Approaches, Challenges and Opportunities. Revista de Informatica Teorica e Aplicada, 30(2), 22–35. https://doi.org/10.22456/2175-2745.129787
Gong, H., Tešić, J., Tao, J., Luo, X., Wang, F. (2023). Automated Pavement Crack Detection with Deep Learning Methods: What Are the Main Factors and How to Improve the Performance? In Transportation Research Record (Vol. 2677, Issue 10, pp. 311–323). SAGE Publications Ltd. https://doi.org/10.1177/03611981231161358
Huang, P., Wang, S., Chen, J., Li, W., Peng, X. (2023). Lightweight Model for Pavement Defect Detection Based on Improved YOLOv7. Sensors, 23(16). https://doi.org/10.3390/s23167112
Hussain, M. (2023). YOLO-v1 to YOLO-v8, the Rise of YOLO and Its Complementary Nature toward Digital Manufacturing and Industrial Defect Detection. In Machines (Vol. 11, Issue 7). Multidisciplinary Digital Publishing Institute (MDPI). https://doi.org/10.3390/machines11070677
Lin, Y. C., Chen, W. H., Kuo, C. H. (2021). Implementation of pavement defect detection system on edge computing platform. Applied Sciences (Switzerland), 11(8). https://doi.org/10.3390/app11083725
Lu, J., Behbood, V., Hao, P., Zuo, H., Xue, S., Zhang, G. (2015). Transfer learning using computational intelligence: A survey. Knowledge-Based Systems, 80, 14–23. https://doi.org/10.1016/j.knosys.2015.01.010
Ma, D., Fang, H., Wang, N., Zhang, C., Dong, J., Hu, H. (2022). Automatic Detection and Counting System for Pavement Cracks Based on PCGAN and YOLO-MF. IEEE Transactions on Intelligent Transportation Systems, 23(11), 22166–22178. https://doi.org/10.1109/TITS.2022.3161960
Pan, Y., Zhang, L. (2021). Roles of artificial intelligence in construction engineering and management: A critical review and future trends. In Automation in Construction (Vol. 122). Elsevier B.V. https://doi.org/10.1016/j.autcon.2020.103517
Terven, J., Córdova-Esparza, D. M., Romero-González, J. A. (2023). A Comprehensive Review of YOLO Architectures in Computer Vision: From YOLOv1 to YOLOv8 and YOLO-NAS. In Machine Learning and Knowledge Extraction (Vol. 5, Issue 4, pp. 1680–1716). Multidisciplinary Digital Publishing Institute (MDPI). https://doi.org/10.3390/make5040083
Wang, A., Chen, H., Liu, L., Chen, K., Lin, Z., Han, J., Ding, G. (2024). YOLOv10: Real-Time End-to-End Object Detection. http://arxiv.org/abs/2405.14458
Wang, C.-Y., Yeh, I.-H., Liao, H.-Y. M. (2024). YOLOv9: Learning What You Want to Learn Using Programmable Gradient Information. http://arxiv.org/abs/2402.13616
Yao, H., Fan, Y., Wei, X., Liu, Y., Cao, D., You, Z. (2024). Research and optimization of YOLO-based method for automatic pavement defect detection. Electronic Research Archive, 32(3), 1708–1730. https://doi.org/10.3934/ERA.2024078
Zhao, Z. Q., Zheng, P., Xu, S. T., Wu, X. (2019). Object Detection with Deep Learning: A Review. In IEEE Transactions on Neural Networks and Learning Systems (Vol. 30, Issue 11, pp. 3212–3232). Institute of Electrical and Electronics Engineers Inc. https://doi.org/10.1109/TNNLS.2018.2876865